GPS模組測試-GPS6MV2
GPS模組測試-GPS6MV2
介紹:
基本上,GPS(全球定位系統)接收器通過計算它們與許多衛星的距離來工作。它們經過預先編程,可以在任何給定時間了解 GPS 衛星的位置,然後使用眾所周知的三邊測量過程計算地球上的位置。地平線上方的衛星越多,您的 GPS 裝置就越能準確地確定您所在的位置。

工作:
電源:2.7V 至 3.6V
默認波特率:9600 bps
電流消耗:45mA。
多達 22 顆衛星在 50 個頻道跟踪
每秒最多更新 5 個位置,水平位置精度為 2.5m。
導航靈敏度:高達 -161 dBm
導航更新率:1Hz
配備外接天線和內置 EEPROM。
接口:RS232 TTL,串行波特率 4800-230400(默認 9600)
工作溫度:-40°C~85°C
通信協議:UBX 二進制、RTCM 和標準 NMEA 輸出:要了解這些句子中每個數據字段的含義,您可以在此處查閱 NMEA 數據。
接線方式:
GPS 模塊將由 3.3V 電源供電。它使用 4pins 接頭上可用的 TX 和 RX 引腳通過串行通信與 ESP32 通信。下圖顯示了本教程中使用的電路原理圖。
將 GPS 模塊的 VCC 引腳連接到 ESP32 3.3V 引腳。
將 GPS 接地引腳連接到 ESP32 接地引腳。
現在,將 GPS 模塊的 RX 引腳連接到 ESP32 的 TX 引腳。同樣,將 GPS 模塊的 TX 引腳連接到 ESP32 的 RX 引腳(ESP32 的 RX 和 TX 引腳在軟件中定義)。

程式碼:
#include <SoftwareSerial.h>
SoftwareSerial ss(16, 17); //Rx, Tx
void setup() {
Serial.begin(115200);
ss.begin(9600);
}
void loop() {
while (ss.available()>0)
{
byte gpsData=ss.read();
Serial.write(gpsData);
}
}

但是~~~~
因為測試出來的數據是海洋協會制定的GPS裝置NMEA標準格式,我們一般也很難看的懂所以必須經過解析成經緯度,如下圖:
24.00289-N(北緯), 121.59619-E(東經)

利用TinyGPS++程式庫以利轉換經緯度
將下載的函式庫用Arduino IDE的匯入草稿碼加入ZIP
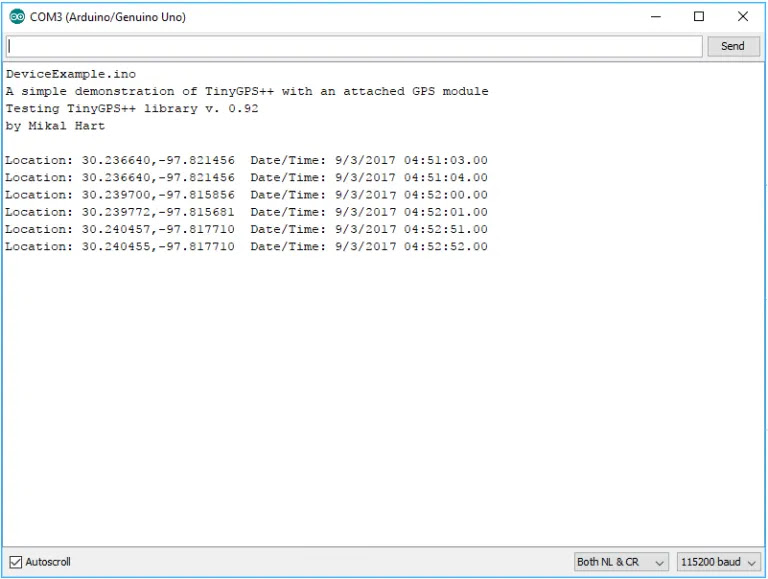
使用範例->TinyGPSPlus->DeviceExample
#include <TinyGPSPlus.h>
#include <SoftwareSerial.h>
/*
This sample sketch demonstrates the normal use of a TinyGPSPlus (TinyGPSPlus) object.
It requires the use of SoftwareSerial, and assumes that you have a
4800-baud serial GPS device hooked up on pins 4(rx) and 3(tx).
*/
static const int RXPin = 16, TXPin = 17;
static const uint32_t GPSBaud = 9600;
// The TinyGPSPlus object
TinyGPSPlus gps;
// The serial connection to the GPS device
SoftwareSerial ss(RXPin, TXPin);
void setup()
{
Serial.begin(115200);
ss.begin(GPSBaud);
Serial.println(F("DeviceExample.ino"));
Serial.println(F("A simple demonstration of TinyGPSPlus with an attached GPS module"));
Serial.print(F("Testing TinyGPSPlus library v. ")); Serial.println(TinyGPSPlus::libraryVersion());
Serial.println(F("by Mikal Hart"));
Serial.println();
}
void loop()
{
// This sketch displays information every time a new sentence is correctly encoded.
while (ss.available() > 0)
if (gps.encode(ss.read()))
displayInfo();
if (millis() > 5000 && gps.charsProcessed() < 10)
{
Serial.println(F("No GPS detected: check wiring."));
while(true);
}
}
void displayInfo()
{
Serial.print(F("Location: "));
if (gps.location.isValid())
{
Serial.print(gps.location.lat(), 6);
Serial.print(F(","));
Serial.print(gps.location.lng(), 6);
}
else
{
Serial.print(F("INVALID"));
}
Serial.print(F(" Date/Time: "));
if (gps.date.isValid())
{
Serial.print(gps.date.month());
Serial.print(F("/"));
Serial.print(gps.date.day());
Serial.print(F("/"));
Serial.print(gps.date.year());
}
else
{
Serial.print(F("INVALID"));
}
Serial.print(F(" "));
if (gps.time.isValid())
{
if (gps.time.hour() < 10) Serial.print(F("0"));
Serial.print(gps.time.hour());
Serial.print(F(":"));
if (gps.time.minute() < 10) Serial.print(F("0"));
Serial.print(gps.time.minute());
Serial.print(F(":"));
if (gps.time.second() < 10) Serial.print(F("0"));
Serial.print(gps.time.second());
Serial.print(F("."));
if (gps.time.centisecond() < 10) Serial.print(F("0"));
Serial.print(gps.time.centisecond());
}
else
{
Serial.print(F("INVALID"));
}
Serial.println();
}

因為我是使用esp32所以Rx改為pin16,Tx改為pin17
GPS波特率改為9600
然後上傳到板子裡




留言
張貼留言